¡Tu solución está lista!
Nuestra ayuda de expertos desglosó tu problema en una solución confiable y fácil de entender.
Mira la respuestaMira la respuesta done loadingPregunta: Robótica/Mecatrónica Muestra y explica paso a paso tu trabajo. Asigne todos los marcos, enlaces y longitudes necesarios de manera clara. Escrito a mano. Obtenga elDH tabla del siguiente robot RRP Obtenga la cinemática de posición inversa y el jacobiano del robot de brazo esférico (como se muestra en la figura de las diapositivas).
RobticaMecatrnica Muestra y explica paso a paso tu trabajo. Asigne todos los marcos, enlaces y longitudes necesarios de manera clara. Escrito a mano. Obtenga elDH tabla del siguiente robot RRP Obtenga la cinemtica de posicin inversa y el jacobiano del robot de brazo esfrico como se muestra en la figura de las diapositivas 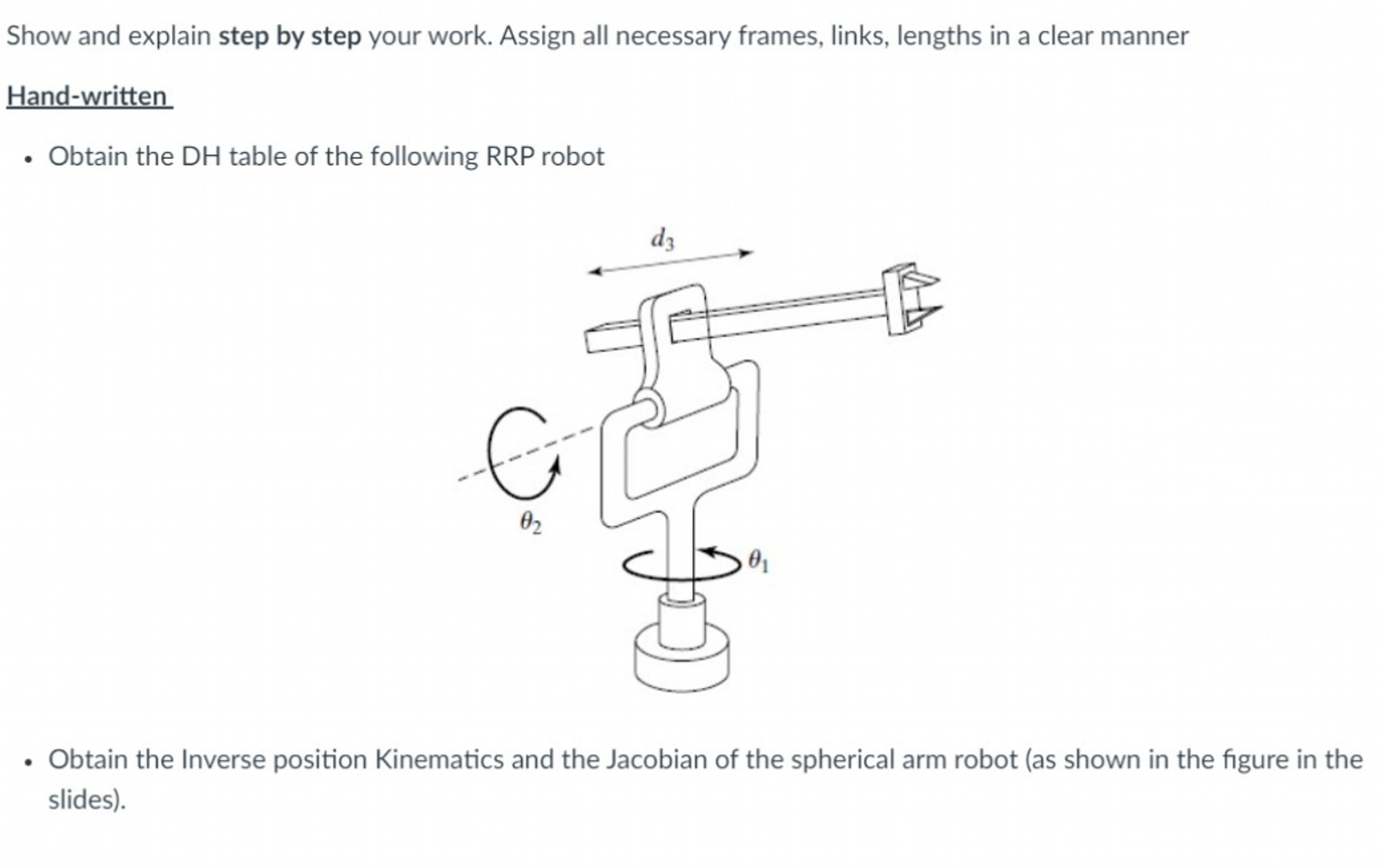
 Hay 2 pasos para resolver este problema.SoluciónPaso 1Mira la respuesta completa
Hay 2 pasos para resolver este problema.SoluciónPaso 1Mira la respuesta completaPara generar la tabla DH (Denavit-Hartenberg) para el robot RRP proporcionado, no...
Paso 2 DesbloqueaRespuestaDesbloquea
DesbloqueaRespuestaDesbloquea
Estudia mejor, ¡ahora en español!
Entiende todos los problemas con explicaciones al instante y pasos fáciles de aprender de la mano de expertos reales.