¡Tu solución está lista!
Nuestra ayuda de expertos desglosó tu problema en una solución confiable y fácil de entender.
Mira la respuestaMira la respuesta done loadingPregunta: How many poles are there in the right half plane, in the left half plane and in the jw axis for the open-loop system of the figure: R(S) CS) 52 + 4s - 3 84 +453 +852 + 20s +15 2) Using the Routh-Hurwitz criterion indicates
How many poles are there in the right half plane, in the left half plane and in the jw axis for the open-loop system of the figure: R(S) CS) 52 + 4s - 3 84 +453 +852 + 20s +15 2) Using the Routh-Hurwitz criterion indicates how many poles in the closed-loop system shown in the figure are in the left half plane, in the right half plane and on the jw axis. R(S) + 507 C(s) $4+383+10s2+30s+169 1 3) Given the unitary feedback system of the figure R(S) + E(S) C(s) G(S) with Ks (s + 2) G(s) = (52 - 4s +8)(s + 3) a) Find the range of K for stability. b) Find the frequency of oscillation when the system is marginally stable.
 Esta es la mejor manera de resolver el problema.Solución100% (2 calificaciones)Te mostramos cómo abordar esta pregunta.
Esta es la mejor manera de resolver el problema.Solución100% (2 calificaciones)Te mostramos cómo abordar esta pregunta.Este consejo generado con IA está basado en la solución completa de Chegg. ¡Regístrate para ver más!
For the first problem, identify the denominator polynomial of the given open-loop transfer function and set it equal to zero to find the pole locations.
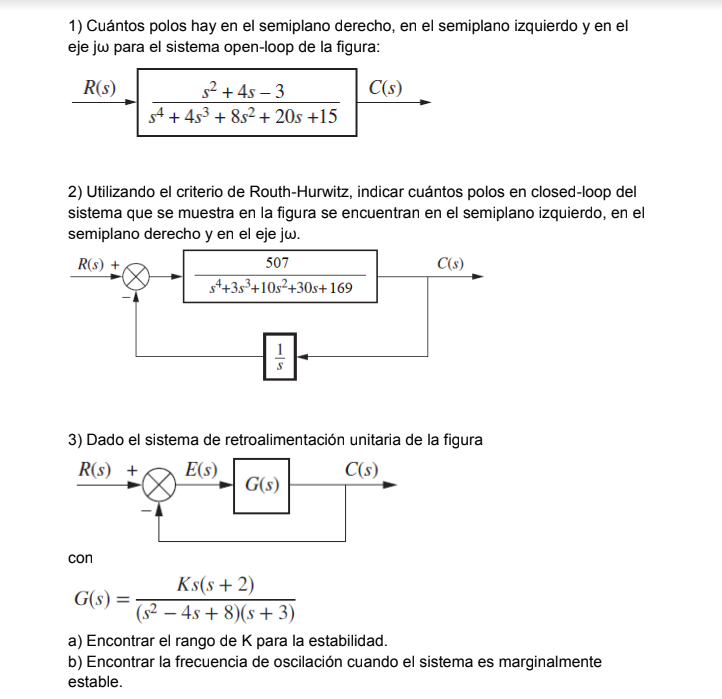
Texto de la transcripción de la imagen:
1) Cuántos polos hay en el semiplano derecho, en el semiplano izquierdo y en el eje jw para el sistema open-loop de la figura: R(S) CS) 52 + 4s - 3 84 +453 +852 + 20s +15 2) Utilizando el criterio de Routh-Hurwitz, indicar cuántos polos en closed-loop del sistema que se muestra en la figura se encuentran en el semiplano izquierdo, en el semiplano derecho y en el eje jw. R(S) + 507 C(s) $4+383+10s2+30s+169 1 3) Dado el sistema de retroalimentación unitaria de la figura R(S) + E(S) C(s) G(S) con Ks(s + 2) G(s) = (52 - 4s +8)(s + 3) a) Encontrar el rango de K para la estabilidad. b) Encontrar la frecuencia de oscilación cuando el sistema es marginalmente estable.
Estudia mejor, ¡ahora en español!
Entiende todos los problemas con explicaciones al instante y pasos fáciles de aprender de la mano de expertos reales.