Pregunta: English: Let be the pendulum propelled by a propeller in the figure, whose variables and parameters are those shown in the respective tables:if the differential equation that models its behavior is the following:use the deviation variable (t) = B(t) - B*(t) to obtain the linearized mathematical model of the system in thenext balance point:{f*(t), B* (t), B*
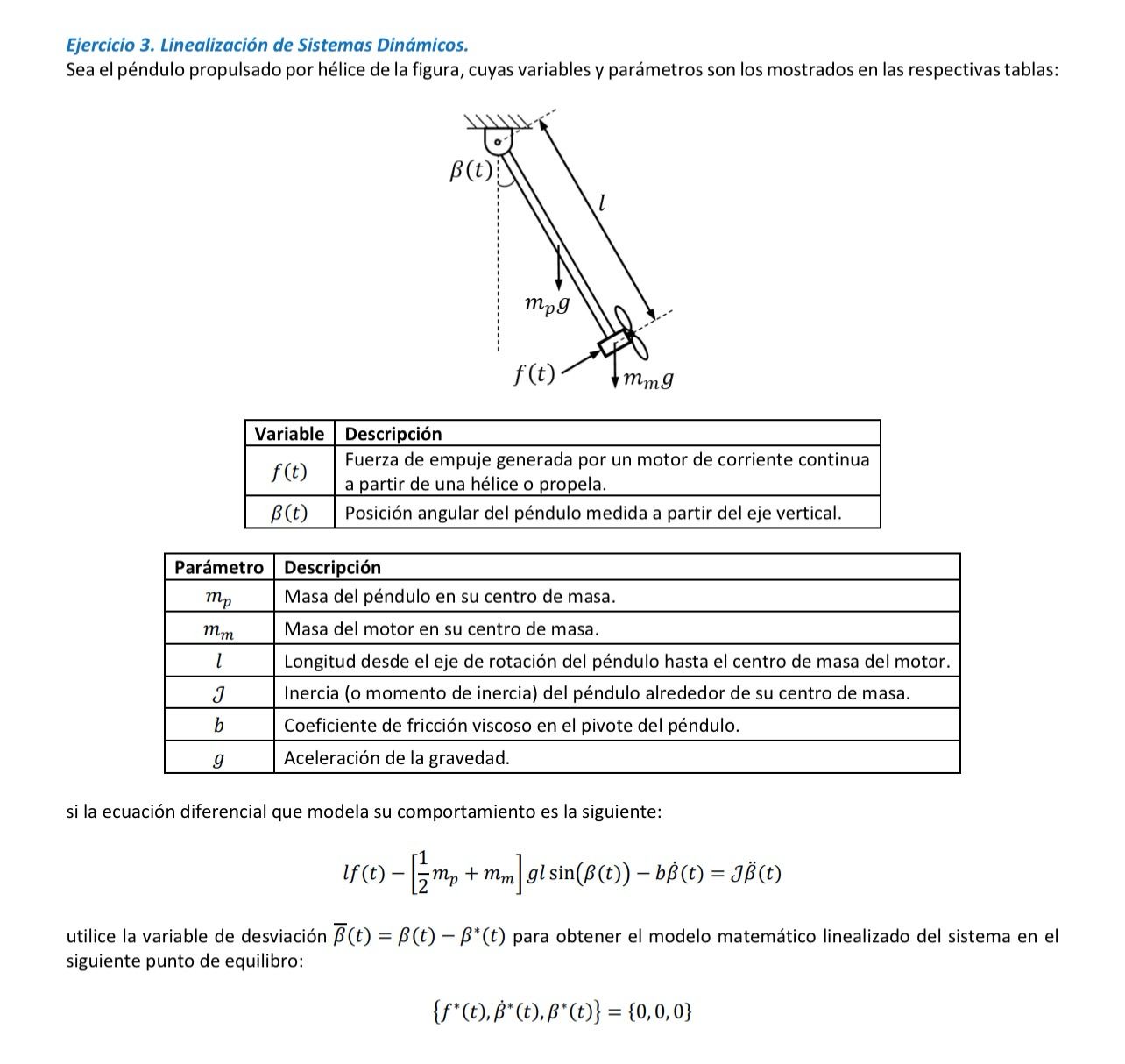
English: Let be the pendulum propelled by a propeller in the figure, whose variables and parameters are those shown in the respective tables:
if the differential equation that models its behavior is the following:
use the deviation variable (t) = B(t) - B*(t) to obtain the linearized mathematical model of the system in the
next balance point:
{f*(t), B* (t), B* (t)} = {0,0,0}Español: Utilizando la serie de Taylor y cualquier otro método, obtenga el modelo matemático linealizado de la siguiente ecuación diferencial: (𝑙)𝑓(𝑡) − [1/2 𝑚1 + 𝑚2] 𝑔𝑙 sin(𝛽(𝑡)) − 𝑏𝛽'(𝑡) = 𝒥𝛽''(𝑡) cuyas variables significan: 𝑓(𝑡) Fuerza de empuje generada por un motor de corriente continua a partir de una hélice o propela. 𝛽(𝑡) Posición angular del péndulo medida a partir del eje vertical. Parámetros: 𝑚1 Masa del péndulo en su centro de masa. 𝑚2 Masa del motor en su centro de masa. 𝑙 Longitud desde el eje de rotación del péndulo hasta el centro de masa del motor. 𝒥 Inercia (o momento de inercia) del péndulo alrededor de su centro de masa. 𝑏 Coeficiente de fricción viscoso en el pivote del péndulo. 𝑔 Aceleración de la gravedad. Usa su variable de desviación está representada por: 𝛥𝛽(𝑡) = 𝛽(𝑡) - 𝛽∗(𝑡) Para encontrar el modelo matemático linealizado en los siguientes puntos de equilibrio: {𝑓∗(𝑡), 𝛽'∗(𝑡), 𝛽∗(𝑡)} = {0, 0, 0}
 Esta pregunta aún no se resolvió!¿No es lo que buscas?Envía tu pregunta a un experto en la materia.Texto de la transcripción de la imagen:Ejercicio 3. Linealización de Sistemas Dinámicos. Sea el péndulo propulsado por hélice de la figura, cuyas variables y parámetros son los mostrados en las respectivas tablas: si la ecuación diferencial que modela su comportamiento es la siguiente: lf(t)−[21mp+mm]glsin(β(t))−bβ˙(t)=Jβ¨(t) utilice la variable de desviación βˉ(t)=β(t)−β∗(t) para obtener el modelo matemático linealizado del sistema en el siguiente punto de equilibro: {f∗(t),β˙∗(t),β∗(t)}={0,0,0}
Esta pregunta aún no se resolvió!¿No es lo que buscas?Envía tu pregunta a un experto en la materia.Texto de la transcripción de la imagen:Ejercicio 3. Linealización de Sistemas Dinámicos. Sea el péndulo propulsado por hélice de la figura, cuyas variables y parámetros son los mostrados en las respectivas tablas: si la ecuación diferencial que modela su comportamiento es la siguiente: lf(t)−[21mp+mm]glsin(β(t))−bβ˙(t)=Jβ¨(t) utilice la variable de desviación βˉ(t)=β(t)−β∗(t) para obtener el modelo matemático linealizado del sistema en el siguiente punto de equilibro: {f∗(t),β˙∗(t),β∗(t)}={0,0,0}
Estudia mejor, ¡ahora en español!
Entiende todos los problemas con explicaciones al instante y pasos fáciles de aprender de la mano de expertos reales.