Pregunta: Ejercicio 3. Linealización de Sistemas Dinámicos. Sea el péndulo propulsado por hélice de la figura, cuyas variables y parámetros son los mostrados en las respectivas tablas: si la ecuación diferencial que modela su comportamiento es la siguiente: lf(t)−[21mp+mm]glsin(β(t))−bβ˙(t)=β¨(t) utilice la variable de desviación βˉ(t)=β(t)−β∗(t) para obtener el
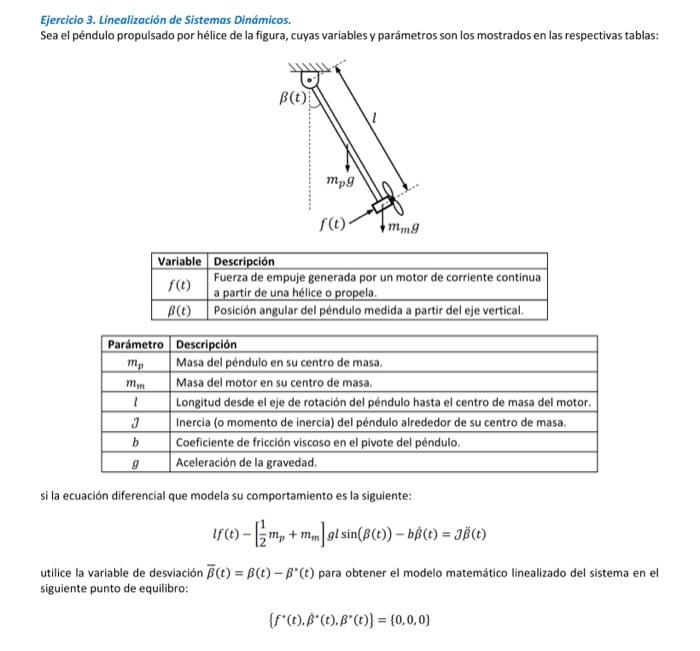
Dinamic systems Esta pregunta aún no se resolvió!¿No es lo que buscas?Envía tu pregunta a un experto en la materia.Texto de la transcripción de la imagen:Ejercicio 3. Linealización de Sistemas Dinámicos. Sea el péndulo propulsado por hélice de la figura, cuyas variables y parámetros son los mostrados en las respectivas tablas: si la ecuación diferencial que modela su comportamiento es la siguiente: lf(t)−[21mp+mm]glsin(β(t))−bβ˙(t)=β¨(t) utilice la variable de desviación βˉ(t)=β(t)−β∗(t) para obtener el modelo matemático linealizado del sistema en el siguiente punto de equilibro: {f∗(t),β^∗(t),β∗(t)}={0,0,0}
Esta pregunta aún no se resolvió!¿No es lo que buscas?Envía tu pregunta a un experto en la materia.Texto de la transcripción de la imagen:Ejercicio 3. Linealización de Sistemas Dinámicos. Sea el péndulo propulsado por hélice de la figura, cuyas variables y parámetros son los mostrados en las respectivas tablas: si la ecuación diferencial que modela su comportamiento es la siguiente: lf(t)−[21mp+mm]glsin(β(t))−bβ˙(t)=β¨(t) utilice la variable de desviación βˉ(t)=β(t)−β∗(t) para obtener el modelo matemático linealizado del sistema en el siguiente punto de equilibro: {f∗(t),β^∗(t),β∗(t)}={0,0,0}
Texto de la transcripción de la imagen:
Ejercicio 3. Linealización de Sistemas Dinámicos. Sea el péndulo propulsado por hélice de la figura, cuyas variables y parámetros son los mostrados en las respectivas tablas: si la ecuación diferencial que modela su comportamiento es la siguiente: lf(t)−[21mp+mm]glsin(β(t))−bβ˙(t)=β¨(t) utilice la variable de desviación βˉ(t)=β(t)−β∗(t) para obtener el modelo matemático linealizado del sistema en el siguiente punto de equilibro: {f∗(t),β^∗(t),β∗(t)}={0,0,0}
Estudia mejor, ¡ahora en español!
Entiende todos los problemas con explicaciones al instante y pasos fáciles de aprender de la mano de expertos reales.