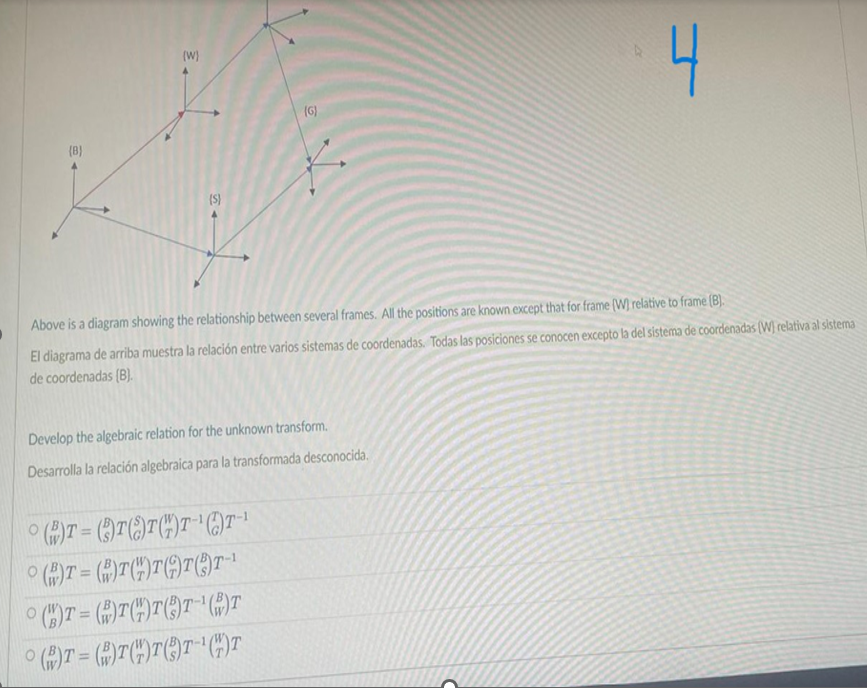
Pregunta: Above is a diagram showing the relationship between several frames. All the positions are known except that for frame (W) relative to frame (B). El diagrama de arriba muestra la relación entre varios sistemas de coordenadas. Todas las posiciones se conocen excepto la del sistema de coordenadas (W) relativa al sistema de coordenadas (B). Develop the algebraic
 Esta pregunta aún no se resolvió!¿No es lo que buscas?Envía tu pregunta a un experto en la materia.Texto de la transcripción de la imagen:Above is a diagram showing the relationship between several frames. All the positions are known except that for frame (W) relative to frame (B). El diagrama de arriba muestra la relación entre varios sistemas de coordenadas. Todas las posiciones se conocen excepto la del sistema de coordenadas (W) relativa al sistema de coordenadas (B). Develop the algebraic relation for the unknown transform. Desarrolla la relación algebraica para la transformada desconocida. (BW)T=(BS)T(SG)T(WT)T−1(TG)T−1(BW)T=(BW)T(WT)T(GT)T(BS)T−1(WB)T=(BW)T(WT)T(Bs)T−1(BW)T(BW)T=(BW)T(WT)T(BS)T−1(WT)T
Esta pregunta aún no se resolvió!¿No es lo que buscas?Envía tu pregunta a un experto en la materia.Texto de la transcripción de la imagen:Above is a diagram showing the relationship between several frames. All the positions are known except that for frame (W) relative to frame (B). El diagrama de arriba muestra la relación entre varios sistemas de coordenadas. Todas las posiciones se conocen excepto la del sistema de coordenadas (W) relativa al sistema de coordenadas (B). Develop the algebraic relation for the unknown transform. Desarrolla la relación algebraica para la transformada desconocida. (BW)T=(BS)T(SG)T(WT)T−1(TG)T−1(BW)T=(BW)T(WT)T(GT)T(BS)T−1(WB)T=(BW)T(WT)T(Bs)T−1(BW)T(BW)T=(BW)T(WT)T(BS)T−1(WT)T
Texto de la transcripción de la imagen:
Above is a diagram showing the relationship between several frames. All the positions are known except that for frame (W) relative to frame (B). El diagrama de arriba muestra la relación entre varios sistemas de coordenadas. Todas las posiciones se conocen excepto la del sistema de coordenadas (W) relativa al sistema de coordenadas (B). Develop the algebraic relation for the unknown transform. Desarrolla la relación algebraica para la transformada desconocida. (BW)T=(BS)T(SG)T(WT)T−1(TG)T−1(BW)T=(BW)T(WT)T(GT)T(BS)T−1(WB)T=(BW)T(WT)T(Bs)T−1(BW)T(BW)T=(BW)T(WT)T(BS)T−1(WT)T
Estudia mejor, ¡ahora en español!
Entiende todos los problemas con explicaciones al instante y pasos fáciles de aprender de la mano de expertos reales.