¡Tu solución está lista!
Nuestra ayuda de expertos desglosó tu problema en una solución confiable y fácil de entender.
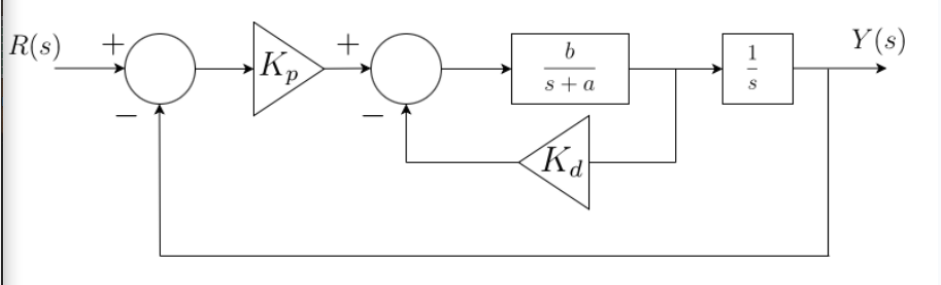
Mira la respuestaMira la respuesta done loadingPregunta: Considere el modelo en posición G1(s) del servomotor de DC a baja frecuencia. G1(s)=b/s(s+a) con a=-4 y b=42. Además considere el diagrama del control en posición del servomotor en la Fig 1.1.Utilice el criterio de Routh-Hurwitz y obtenga los valores de las ganancias Kp y Kd para estabilizar al sistema en lazo cerrado2.Obtenga el error en estado estacionario
Considere el modelo en posición G1(s) del servomotor de DC a baja frecuencia. G1(s)=b/s(s+a) con a=-4 y b=42. Además considere el diagrama del control en posición del servomotor en la Fig 1.
1.Utilice el criterio de Routh-Hurwitz y obtenga los valores de las ganancias Kp y Kd para estabilizar al sistema en lazo cerrado
2.Obtenga el error en estado estacionario e(∞):limt∞e(t) y la entrada de control en estado estacionario u(∞):=limt∞u(t) ante una entrada escalón con amplitud igual a 0.1 rad(i.e. R(s)=0.1/s)
 Hay 2 pasos para resolver este problema.SoluciónPaso 1Mira la respuesta completa
Hay 2 pasos para resolver este problema.SoluciónPaso 1Mira la respuesta completaThe given question is
Consider the position model G1(s) of the low-frequency DC servomotor:
 DesbloqueaRespuestaDesbloquea
DesbloqueaRespuestaDesbloquea
Estudia mejor, ¡ahora en español!
Entiende todos los problemas con explicaciones al instante y pasos fáciles de aprender de la mano de expertos reales.