¡Tu solución está lista!
Nuestra ayuda de expertos desglosó tu problema en una solución confiable y fácil de entender.
Mira la respuestaMira la respuesta done loadingPregunta: (8) o 18 (5) (0) The diagram above shows a manipulator with 5 degrees of freedom. The values of BPs and SPG are shown below. Frame {S} is rotated with respect to frame {B} by 25 degrees and frame {G} is rotated with respect to frame {B} by 30 degrees. Both rotations occur around 2 axis and the position vectors have the values shown below. El diagrama de
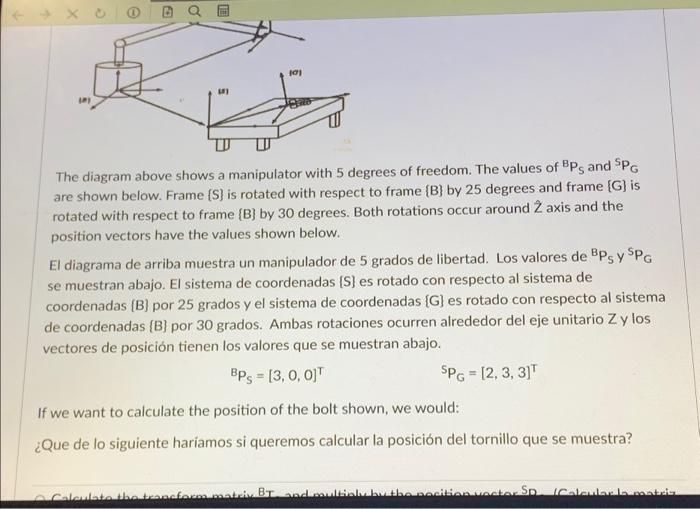
(8) o 18 (5) (0) The diagram above shows a manipulator with 5 degrees of freedom. The values of BPs and SPG are shown below. Frame {S} is rotated with respect to frame {B} by 25 degrees and frame {G} is rotated with respect to frame {B} by 30 degrees. Both rotations occur around 2 axis and the position vectors have the values shown below. El diagrama de arriba muestra un manipulador de 5 grados de libertad. Los valores de BPs y SPG se muestran abajo. El sistema de coordenadas {S} es rotado con respecto al sistema de coordenadas {B} por 25 grados y el sistema de coordenadas {G} es rotado con respecto al sistema de coordenadas {B} por 30 grados. Ambas rotaciones ocurren alrededor del eje unitario Z y los vectores de posición tienen los valores que se muestran abajo. BPS = [3, 0, 0] If we want to calculate the position of the bolt shown, we would: ¿Que de lo siguiente haríamos si queremos calcular la posición del tornillo que se muestra? SPG [2, 3, 3]T - Calculate the transform matriv BT and multiply by the position vector SD Calcular la matriz Hay 3 pasos para resolver este problema.SoluciónPaso 1Mira la respuesta completa
Hay 3 pasos para resolver este problema.SoluciónPaso 1Mira la respuesta completaIntroducción
En el problema se solicita calcular la posición del tornillo en base a los sistemas coor...
Paso 2 DesbloqueaPaso 3DesbloqueaRespuestaDesbloquea
DesbloqueaPaso 3DesbloqueaRespuestaDesbloquea
Texto de la transcripción de la imagen:
The diagram above shows a manipulator with 5 degrees of freedom. The values of 8PS and 5PG are shown below. Frame {S} is rotated with respect to frame {B} by 25 degrees and frame {G} is rotated with respect to frame {B} by 30 degrees. Both rotations occur around Z^ axis and the position vectors have the values shown below. El diagrama de arriba muestra un manipulador de 5 grados de libertad. Los valores de BPSYSPG se muestran abajo. El sistema de coordenadas [S\} es rotado con respecto al sistema de coordenadas (B ) por 25 grados y el sistema de coordenadas {G} es rotado con respecto al sistema de coordenadas {B] por 30 grados. Ambas rotaciones ocurren alrededor del eje unitario Z y los vectores de posición tienen los valores que se muestran abajo. BpS=[3,0,0]⊤⊤PG=[2,3,3]⊤ If we want to calculate the position of the bolt shown, we would: ¿Que de lo siguiente hariamos si queremos calcular la posición del tornillo que se muestra?
Estudia mejor, ¡ahora en español!
Entiende todos los problemas con explicaciones al instante y pasos fáciles de aprender de la mano de expertos reales.