¡Tu solución está lista!
Nuestra ayuda de expertos desglosó tu problema en una solución confiable y fácil de entender.
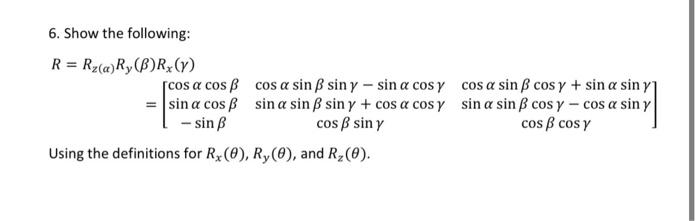
Mira la respuestaMira la respuesta done loadingPregunta: 6. Show the following: R=Rz(α)Ry(β)Rx(γ)=⎣⎡cosαcosβsinαcosβ−sinβcosαsinβsinγ−sinαcosγsinαsinβsinγ+cosαcosγcosβsinγcosαsinβcosγ+sinαsinγsinαsinβcosγ−cosαsinγcosβcosγ⎦⎤ Using the definitions for Rx(θ),Ry(θ), and Rz(θ).
Help!! Hay 2 pasos para resolver este problema.Solución
Hay 2 pasos para resolver este problema.Solución
Texto de la transcripción de la imagen:
6. Show the following: R=Rz(α)Ry(β)Rx(γ)=⎣⎡cosαcosβsinαcosβ−sinβcosαsinβsinγ−sinαcosγsinαsinβsinγ+cosαcosγcosβsinγcosαsinβcosγ+sinαsinγsinαsinβcosγ−cosαsinγcosβcosγ⎦⎤ Using the definitions for Rx(θ),Ry(θ), and Rz(θ).
Estudia mejor, ¡ahora en español!
Entiende todos los problemas con explicaciones al instante y pasos fáciles de aprender de la mano de expertos reales.